
Measuring Atomic Steps
Sub-Nanometer Motion
>>Measuring Surface Roughness
Additional Information
PicoQ® Sensor Technology
MadPLL® Brochure
AFM Video Tutorial
Laser Focus World Article
Related Products
SPM-M Kit
Tuning Forks
MadPLL®
Nano-HS Series
Nano-LP Series
Questions?
E-Mail Us
Measuring Surface RoughnessMad City Labs nanopositioners have unmatched precision and resolution capabilities due to the inherent low-noise properties of proprietary PicoQ® sensor technology. A relevant application for nanopositioning is atomic force microscopy (AFM). Imaging calibrated samples using an AFM is a demanding application of nanopositioning systems. Below, the surface roughness of a well-known sample is measured with a Mad City Labs AFM. The results of this test are significant because large position noise in a nanopositioner can obscure an AFM's surface roughness measurement. The AFM measurements below are yet another confirmation that Mad City Labs nanopositioners with PicoQ® sensor technology set the standard for the lowest position noise on the market. Inherent position noise of nanopositioning systems with PicoQ® sensors has already been shown to be in the 10s of pm/√Hz [MacKay, James F. Understanding noise at the nanometer scale. Laser Focus World, 43.3, (2007)]. Please click on a heading to view a topic. Click the heading a second time to collapse the topic. |
Testing Principle
The AFM probe tip is positioned in proximity to the sample surface using the Z-axis of a nanopositioner. The distance between the probe tip and the sample surface is directly related to the magnitude of the force between the tip and sample. The nanopositioner is moved to maintain constant force between the tip and the surface. In a typical experiment, the tip is scanned along the X and Y axes. In this experiment, the Z-axis position is measured directly to provide a height measurement of the sample. Mad City Labs nanopositioners include integrated, direct measurement position sensors with PicoQ® sensor technology, already calibrated using NIST-traceable interferometric methods. Any displacement of the moving portion of the nanopositioner will yield a change in position sensor output, with the resolution ultimately limited by the noise of the nanopositioning system. Total AFM noise must be sufficiently low in order to externally measure sub-nanometer motion. Measuring the output of the nanopositioner's absolute position sensors assures accurate scan size and Z-axis position of the probe as it scans over the surface. |
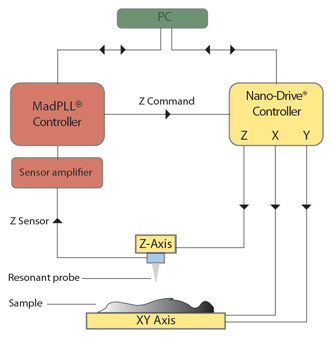
Test SetupIn the following tests, the AFM instrument consisted of a Nano-HS3 nanopositioning system with PicoQ® sensor technology for XYZ probe motion mounted on a SPM-MZ for Z axis coarse approach. A MadPLL® was used for closed loop feedback to maintain probe position in Z and an etched Tungsten tip attached to a quartz tuning fork was used as the imaging probe. Data were acquired using AFMView™ software, and analyzed and presented using SPIP® software.
|
Measuring Surface RoughnessA Silicon (111) substrate of single atomic layer steps was scanned and imaged using a Mad City Labs AFM. The AFM measured the surface roughness of one terrace of the sample. The given surface roughness of a terrace on this sample is 60 pm RMS (Ted Pella part #629-89), measured by several techniques. For more information about comparative metrology, see C. Teichert, J. F. MacKay, D. E. Savage, M. G. Lagally, M. Brohl, and P. Wagner. Comparison of surface roughness of polished silicon wafers measured by light scattering topography, soft‐x‐ray scattering, and atomic‐force microscopy. Appl. Phys. Lett. 66, 2346 (1995). In the first test, the Mad City Labs AFM measured a single terrace surface roughness of 60 pm RMS, equal to the given surface roughness. The fact that the Mad City Labs AFM was able to measure the surface roughness confirms that it has extremely low position noise, lower than the stated surface roughness value of 60 pm RMS. AFM is one relevant application of Mad City Labs nanopositioners with PicoQ® sensor technology. A second test was performed to measure the noise contribution from a Nano-LP100 holding the sample. First, the AFM scanned over a larger area consisting of several Si (111) terraces while the Nano-LP100 powered off. Surface roughness data from a single terrace was analyzed to provide a baseline surface roughness measurement for the setup. Next, the same surface roughness measurement was performed with the Nano-LP100 powered on. The surface roughness value measured with the Nano-LP100 powered on was the same. This demonstrates that the Nano-LP100 did not introduce additional position noise to the measurement. This is another demonstration of the ultra-low noise and high stability properties of Mad City Labs long range nanopositioners using PicoQ® sensor technology. Figure 1 shows the Si (111) atomic steps as measured by the Mad City Labs AFM with the sample placed on a Nano-LP100 powered on, and in closed-loop mode.
|
Additional Information | ||
|
Laser Focus World Article  NANOPOSITIONING: Piezoelectric nanopositioners forge low-cost atomic force microscope |
AFM Video Tutorial |
MadPLL® Brochure |
Related Products |
Copyright © 2024